100mJ ਲੇਜ਼ਰ ਟਾਰਗੇਟ ਡਿਜ਼ਾਈਨਟਰ




ਤਕਨੀਕੀ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ
| ਤਰੰਗ ਲੰਬਾਈ | 1.064μm |
| ਆਉਟਪੁੱਟ ਊਰਜਾ | ਕੁੱਲ ਤਾਪਮਾਨ: 100mJ ~ 120mJ, ਔਸਤ ਆਉਟਪੁੱਟ ਊਰਜਾ ≥110mJ, ਸਿੰਗਲ ਪਲਸ ਊਰਜਾ > 100mJ (ਹਟਾਉਣ ਤੋਂ 2 ਸਕਿੰਟ ਪਹਿਲਾਂ) |
| ਨਾਲ ਲੱਗਦੀ ਪਲਸ ਊਰਜਾ ਉਤਰਾਅ-ਚੜ੍ਹਾਅ ਸੀਮਾ | ≤8% |
| ਬੀਮ ਫੈਲਾਅ ਕੋਣ | 0.15mrad (ਸਵੀਕ੍ਰਿਤੀ ਵਿਧੀ ਹੋਲ-ਹੋਲ ਵਿਧੀ ਨੂੰ ਅਪਣਾਉਂਦੀ ਹੈ, ਅਤੇ ਹੋਲ-ਹੋਲ ਤੋਂ ਹੋਲ-ਫ੍ਰੀ ਦਾ ਅਨੁਪਾਤ 86.5% ਤੋਂ ਘੱਟ ਨਹੀਂ ਹੈ) |
| ਬੀਮ ਦੀ ਸਥਾਨਿਕ ਪੁਆਇੰਟਿੰਗ ਅਸਥਿਰਤਾ | ≤0.03mrad (1σ) |
| ਕਿਰਨ ਦੀ ਬਾਰੰਬਾਰਤਾ | ਸਟੀਕ ਕੋਡਿੰਗ 45ms~56ms (ਕੋਡ 20Hz ਚੈੱਕ ਕਰੋ) |
| ਪਲਸ ਚੱਕਰ ਸ਼ੁੱਧਤਾ | ≤±2.5μs |
| ਪਲਸ ਚੌੜਾਈ | 15ns±5ns |
| ਕਿਰਨ ਦਾ ਸਮਾਂ | 90s ਤੋਂ ਘੱਟ ਨਹੀਂ, ਅੰਤਰਾਲ 60s, ਜਾਂ 60s ਤੋਂ ਘੱਟ ਨਹੀਂ, ਅੰਤਰਾਲ 30s, ਕਮਰੇ ਦੇ ਤਾਪਮਾਨ ਅਤੇ ਘੱਟ ਤਾਪਮਾਨ 'ਤੇ ਲਗਾਤਾਰ ਕਿਰਨਾਂ ਦੇ 4 ਚੱਕਰ, ਉੱਚ ਤਾਪਮਾਨ 'ਤੇ ਲਗਾਤਾਰ ਕਿਰਨਾਂ ਦੇ 2 ਚੱਕਰ |
| ਰੇਂਜਿੰਗ ਸੀਮਾ | ਨਿਊਨਤਮ ਮੁੱਲ 300m ਤੋਂ ਵੱਧ ਨਹੀਂ ਹੈ, ਅਧਿਕਤਮ 35km ਤੋਂ ਘੱਟ ਨਹੀਂ ਹੈ (23km ਦਿੱਖ, ਮੱਧਮ ਵਾਯੂਮੰਡਲ ਗੜਬੜ, 2.3m×2.3m ਟੀਚੇ ਲਈ, ਟੀਚਾ ਪ੍ਰਤੀਬਿੰਬ ਗੁਣਾਂਕ 0.2 ਤੋਂ ਵੱਧ ਹੈ) |
| ਇਰਡੀਏਸ਼ਨ ਦੂਰੀ | 2.3m×2.3m ਟੀਚੇ ਲਈ, 16km ਤੋਂ ਘੱਟ ਨਹੀਂ |
| ਸਧਾਰਣ ਤਾਪਮਾਨ ਪਾਵਰ-ਅੱਪ ਦੀ ਤਿਆਰੀ ਦਾ ਸਮਾਂ | <30 ਸਕਿੰਟ |
| ਘੱਟ ਤਾਪਮਾਨ ਪਾਵਰ-ਅੱਪ ਦੀ ਤਿਆਰੀ ਦਾ ਸਮਾਂ | <3 ਮਿੰਟ |
| ਸੇਵਾ ਜੀਵਨ | ≥2 ਮਿਲੀਅਨ ਵਾਰ |
| ਰੇਂਜ ਦੀ ਗਿਣਤੀ ਦੀ ਸੀਮਾ | 200m ~ 40km |
| ਰੇਂਜਿੰਗ ਸ਼ੁੱਧਤਾ | ±2 ਮਿ |
| ਸਹੀ ਮਾਪ ਦਰ | ≥98% |
| ਰੇਂਜਿੰਗ ਬਾਰੰਬਾਰਤਾ | 1Hz, 5Hz, 10Hz, 20Hz |
| ਇੰਸਟਾਲੇਸ਼ਨ ਡੈਟਮ ਅਤੇ ਲੇਜ਼ਰ ਟ੍ਰਾਂਸਮਿਸ਼ਨ ਆਪਟੀਕਲ ਧੁਰਾ ਗੈਰ-ਸਮਾਂਤਰ | ≤0.5mrad |
| ਇੰਸਟਾਲੇਸ਼ਨ ਡੈਟਮ ਸਮਤਲਤਾ | 0.01mm (ਡਿਜ਼ਾਇਨ ਗਾਰੰਟੀ) |
| ਇਨਸੂਲੇਸ਼ਨ ਟਾਕਰੇ | ਮਿਆਰੀ ਵਾਯੂਮੰਡਲ ਦੇ ਦਬਾਅ ਦੇ ਅਧੀਨ, ਨਿਰਧਾਰਤ ਮਾਪਣ ਬਿੰਦੂ ਦਾ ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਤੀਰੋਧ ਮੁੱਲ ਸਾਰਣੀ 1 ਦੇ ਪ੍ਰਬੰਧਾਂ ਦੇ ਅਨੁਕੂਲ ਹੋਣਾ ਚਾਹੀਦਾ ਹੈ |
ਸਾਰਣੀ 1 ਮਾਪਣ ਵਾਲੇ ਬਿੰਦੂਆਂ ਦੇ ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਤੀਰੋਧ ਮੁੱਲਾਂ ਨੂੰ ਦਰਸਾਉਂਦੀ ਹੈ
| ਕ੍ਰਮ ਸੰਖਿਆ | ਵਾਤਾਵਰਣ ਦੇ ਹਾਲਾਤ | ਇਨਸੂਲੇਸ਼ਨ ਟਾਕਰੇ | Megohm ਮੀਟਰ ਆਉਟਪੁੱਟ ਵੋਲਟੇਜ |
| 1 | ਮਿਆਰੀ ਵਾਯੂਮੰਡਲ ਹਾਲਾਤ | 20 ਮੀਟਰ Ω ਜਾਂ ਵੱਧ | 100 ਵੀ |
u ਬਾਹਰੀ ਲੋਗੋ (ਉਤਪਾਦ ਨੰਬਰ ਸਮੇਤ) ਨੂੰ ਮਜ਼ਬੂਤੀ ਨਾਲ ਫਿਕਸ ਕੀਤਾ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ, ਸਪਸ਼ਟ, ਸੰਪੂਰਨ ਅਤੇ ਪਛਾਣਨ ਵਿੱਚ ਆਸਾਨ।
Pਰੇਂਜਿੰਗ ਦਾ ਰਿੰਸੀਪਲ
ਲੇਜ਼ਰ ਇਮੇਜਰ ਸ਼ੁਰੂ ਹੋਣ ਤੋਂ ਬਾਅਦ, 1Hz ਦੀ ਆਵਰਤੀ ਬਾਰੰਬਾਰਤਾ ਵਾਲੀ ਲੇਜ਼ਰ ਪਲਸ ਨਿਕਲਦੀ ਹੈ, ਜੋ ਟ੍ਰਾਂਸਮੀਟਿੰਗ ਐਂਟੀਨਾ ਰਾਹੀਂ ਮਾਪੇ ਗਏ ਟੀਚੇ ਤੱਕ ਪਹੁੰਚਦੀ ਹੈ।ਬੀਮ ਦਾ ਜ਼ਿਆਦਾਤਰ ਹਿੱਸਾ ਨਿਸ਼ਾਨਾ ਦੁਆਰਾ ਸਮਾਈ ਜਾਂ ਫੈਲਿਆ ਹੋਇਆ ਪ੍ਰਤੀਬਿੰਬਿਤ ਹੁੰਦਾ ਹੈ, ਜਦੋਂ ਕਿ ਬੀਮ ਦਾ ਇੱਕ ਬਹੁਤ ਛੋਟਾ ਹਿੱਸਾ ਪ੍ਰਾਪਤ ਕਰਨ ਵਾਲੇ ਐਂਟੀਨਾ ਵਿੱਚ ਵਾਪਸ ਆ ਜਾਂਦਾ ਹੈ ਅਤੇ ਡਿਟੈਕਟਰ ਮੋਡੀਊਲ ਉੱਤੇ ਕਨਵਰਜ ਹੋ ਜਾਂਦਾ ਹੈ।ਡਿਟੈਕਟਰ ਮੋਡੀਊਲ ਪ੍ਰਤੀਬਿੰਬਿਤ ਸਿਗਨਲ ਦਾ ਨਮੂਨਾ ਲੈਂਦਾ ਹੈ ਅਤੇ ਇੱਕ ਐਲਗੋਰਿਦਮ ਦੁਆਰਾ ਮਾਪੇ ਗਏ ਟੀਚੇ ਦੀ ਦੂਰੀ ਦੀ ਜਾਣਕਾਰੀ ਪ੍ਰਾਪਤ ਕਰਦਾ ਹੈ।
ਗਣਨਾ ਦੀਆਂ ਉਦਾਹਰਨਾਂ:
ਮਾਪਣ ਦਾ ਸਮਾਂ (ਇੱਕ ਗੇੜ ਦੀ ਯਾਤਰਾ) = 10us
ਪ੍ਰਸਾਰ ਦਾ ਸਮਾਂ (ਇਕ ਤਰਫਾ) = 10us/2=5us
ਰੇਂਜਿੰਗ ਦੂਰੀ = ਹਲਕੀ ਗਤੀ × ਯਾਤਰਾ ਦਾ ਸਮਾਂ = 300000km/s×5us=1500m
Rਵੱਖੋ-ਵੱਖਰੇ ਦ੍ਰਿਸ਼ਟੀਕੋਣਾਂ ਵਿੱਚ ਗੁੰਝਲਦਾਰ ਸਮਰੱਥਾ
ਵਾਯੂਮੰਡਲ ਦੀ ਦਿੱਖ ਦਾ ਲੇਜ਼ਰ ਫੋਟੋਮੀਟਰ ਦੀ ਰੇਂਜਿੰਗ ਕਾਰਗੁਜ਼ਾਰੀ 'ਤੇ ਬਹੁਤ ਪ੍ਰਭਾਵ ਪੈਂਦਾ ਹੈ।ਕਿਰਪਾ ਕਰਕੇ ਵੱਖ-ਵੱਖ ਦਿੱਖ ਵਿੱਚ ਇਸ ਉਤਪਾਦ ਦੀ ਰੇਂਜਿੰਗ ਸਮਰੱਥਾ ਲਈ ਚਿੱਤਰ 2 ਵੇਖੋ।
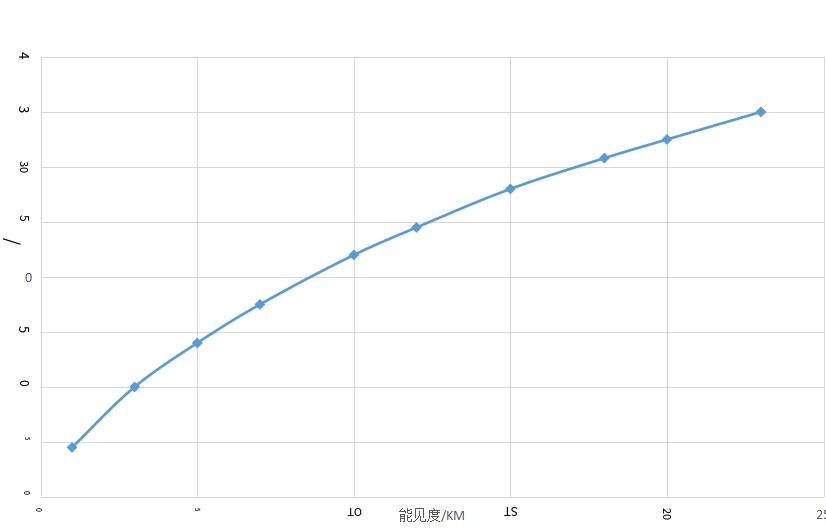
ਚਿੱਤਰ 2 ਲੇਜ਼ਰ ਫੋਟੋਮੀਟਰ ਦੀ ਰੇਂਜਿੰਗ ਸਮਰੱਥਾ ਅਤੇ ਵਾਯੂਮੰਡਲ ਦੀ ਦਿੱਖ ਦੇ ਵਿਚਕਾਰ ਸਬੰਧ
Hਉਮਾਨ ਅੱਖ ਦੀ ਸੁਰੱਖਿਆ
ਲੇਜ਼ਰ ਰੇਂਜਫਾਈਂਡਰ 1064nm ਦੇ ਬੈਂਡ ਵਿੱਚ ਇੱਕ ਲੇਜ਼ਰ ਸਰੋਤ ਦੀ ਵਰਤੋਂ ਕਰਦਾ ਹੈ।ਇਸ ਬੈਂਡ ਵਿੱਚ ਲੇਜ਼ਰ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਸਮੇਂ, ਮਨੁੱਖੀ ਅੱਖ ਦੀ ਸੱਟ ਨੂੰ ਰੋਕਣ ਲਈ ਜਿੱਥੋਂ ਤੱਕ ਸੰਭਵ ਹੋ ਸਕੇ ਮਨੁੱਖੀ ਅੱਖ ਵਿੱਚ ਬਾਹਰ ਜਾਣ ਵਾਲੇ ਬੀਮ ਤੋਂ ਬਚਣਾ ਜ਼ਰੂਰੀ ਹੈ।
MECHICAL ਇੰਟਰਫੇਸ
ਲੇਜ਼ਰ ਫੋਟੋਮੀਟਰ ਦੇ ਮਕੈਨੀਕਲ ਇੰਟਰਫੇਸ ਵਿੱਚ 3 ਤੋਂ ਛੇਕ ਹੁੰਦੇ ਹਨ, ਜੋ ਕਿ 3 M5 ਪੇਚਾਂ ਦੁਆਰਾ ਇੰਸਟਾਲੇਸ਼ਨ ਪਲੇਟਫਾਰਮ 'ਤੇ ਸਥਿਰ ਹੁੰਦੇ ਹਨ।ਮਕੈਨੀਕਲ ਅਤੇ ਆਪਟੀਕਲ ਇੰਟਰਫੇਸ ਦੇ ਮਾਪ ਹੇਠਾਂ ਚਿੱਤਰ 3 ਵਿੱਚ ਦਿਖਾਏ ਗਏ ਹਨ।
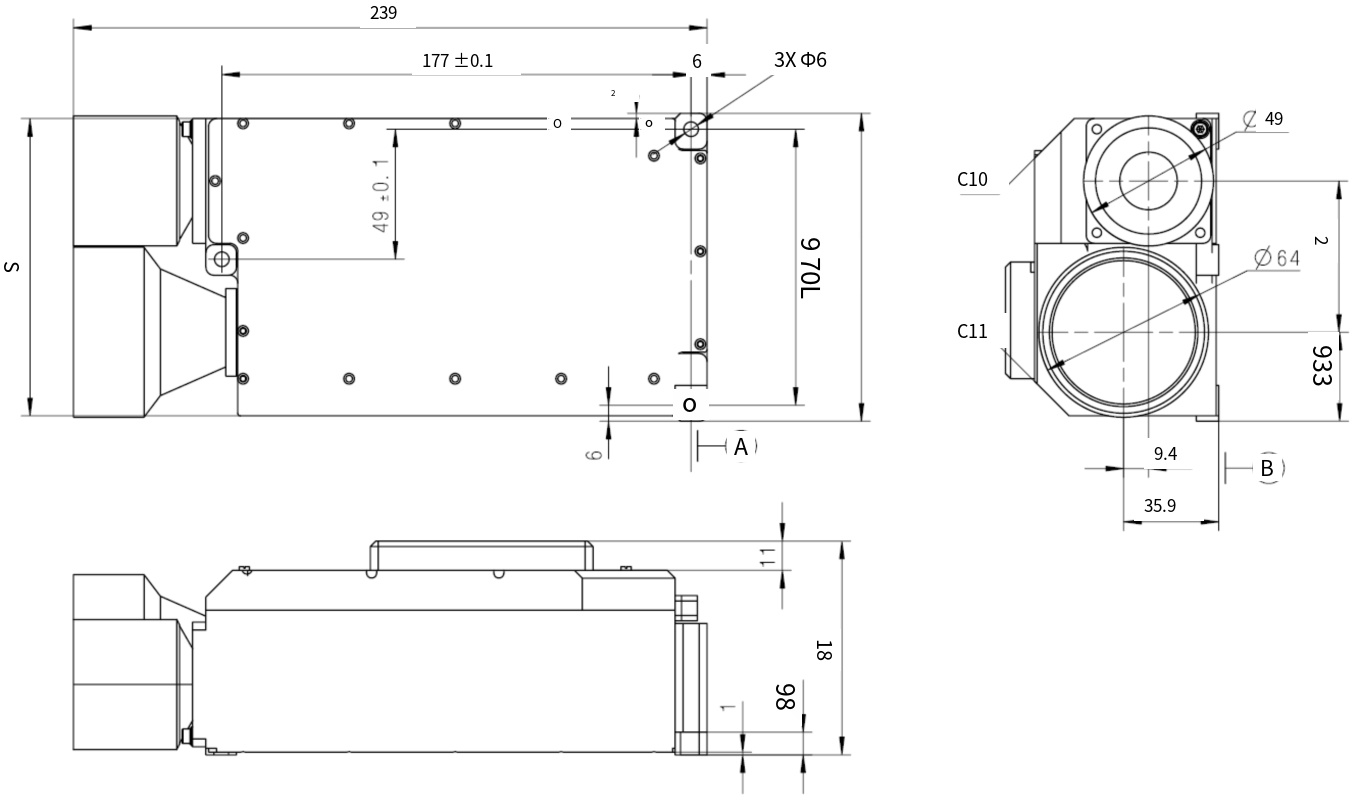
ਚਿੱਤਰ 3 ਮਕੈਨੀਕਲ ਅਤੇ ਆਪਟੀਕਲ ਇੰਟਰਫੇਸ ਦਿਖਾਉਂਦਾ ਹੈ